


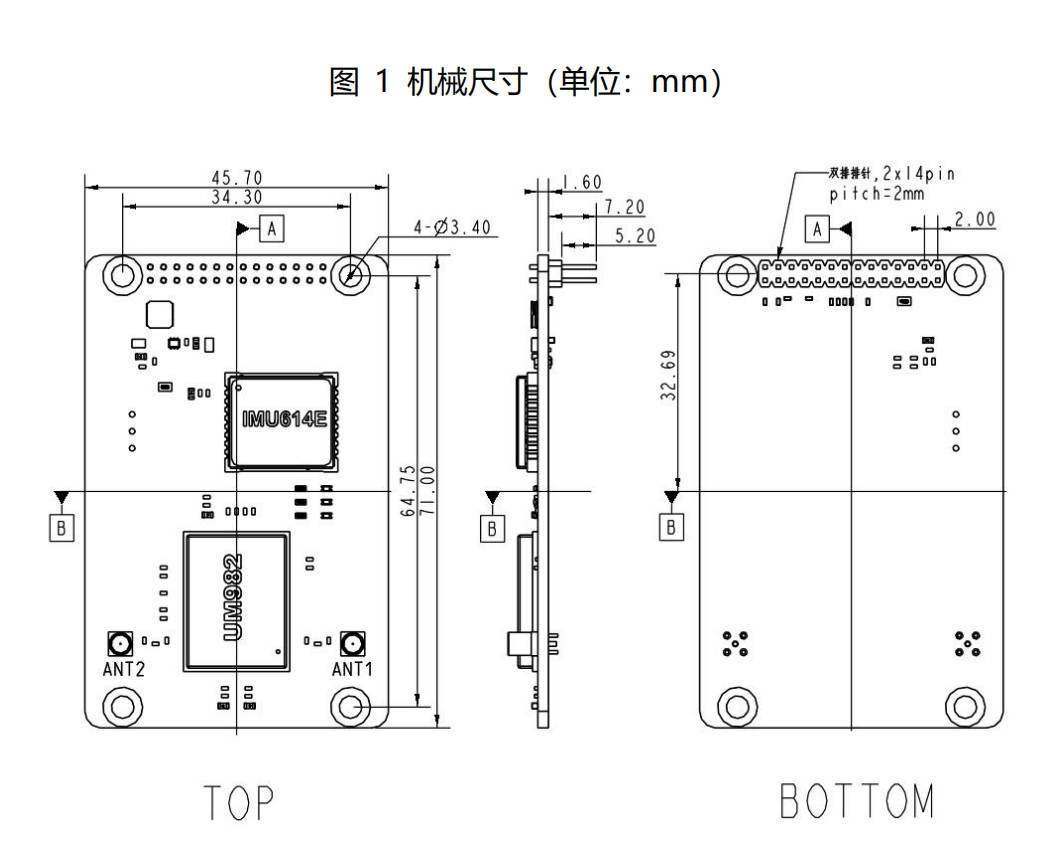
针对农业自动驾驶在果园等轻遮挡场景下的精密定位与连续定位需求,LOL押注(中国)有限公司基于IMU614E-AG 农业单天线IMU模组,集成和芯星通全系统全频点高精度定位定向模组UM982,设计了一款专门针对农业应用场景的板卡级组合导航产品 FS982-AG,内置LOL押注(中国)有限公司针对车载场景的多模型智能位置融合算法,可在复杂应用场景下为农业自动驾驶客户提供高精度车载姿态、航向以及遮挡干扰场景下的连续定位和测速。助力农业自动驾驶的全场景可靠运行,提升自动驾驶设备的终端应用体验。
技术指标:
姿态精度 : Roll/Pitch :<0.2° rms
Heading:<0.3° rms
更新率 : 100hz
陀螺量程 : ±500°/s
陀螺零偏不稳定性: 4deg/h @1σ
加速度计量程: ±6g
加速度计零偏稳定性: 0.04mg @1σ
位置推算精度 : <2% @1σ(车载场景,丢星 30s,无轮速计组合)
组合导航关键指标 | |||
尺寸 | 71.0*45.7*8.8mm | ||
重量 | 17.6 | ||
工作温度 | -40~85℃ | ||
采样率 | 100hz | ||
组合导航姿态精度 | Roll/Pitch :<0.2° rms | ||
组合导航位置精度 | 推算精度<2% @1σ | ||
电源输入 | 最小-0.3V 典型值 5V 最大 5.5V | ||
功耗 | 典型值1.15W | ||
软件接口 | 串口、CAN | ||
硬件接口 | MMCX接口、28pin Cvilux 双排插针 | ||
湿度防护 | 95%非凝露 | ||
RTK关键指标 | |||
参数 | 测试条件/备注 | 最小值 典型值 最大值 | 单位 |
RTK定位精度 | 单点:1.5m | ||
RTK定向精度(RMS) | 0.2°/1m 基线 | ||
RTK速度精度(RMS) | 0.05 | m/s | |
RTK更新率 | 20 | Hz | |
RTK 初始化时间 | <5s | ||
| |||
参数 | 测试条件/备注 | 最小值 典型值 最大值 | 单位 |
IMU更新率 | 100 | HZ | |
陀螺量程 | ±500 | °/s | |
陀螺零偏不稳定性 | @25℃, 1σ | 3 | deg/h @1σ |
陀螺仪轴间非正交 | 0.02 | deg | |
陀螺仪随机游走 | @25℃,ALLAN 方差 | 0.3 | /√hr |
加速度计量程 | ±6 | g | |
加速度计零偏稳定性 | 0.04 | mg @1σ | |
加速度计随机游走 | @25℃,ALLAN 方差 | 0.05 | m/s/√hr |

;){kind=link}
;){kind=link}